OmniClimbers - Climbing Robots with high maneuverability for inspection and maintenance of 3D human-made structures
Project name: OmniClimbers - Climbing Robots with high maneuverability for inspection and maintenance of 3D human-made structures
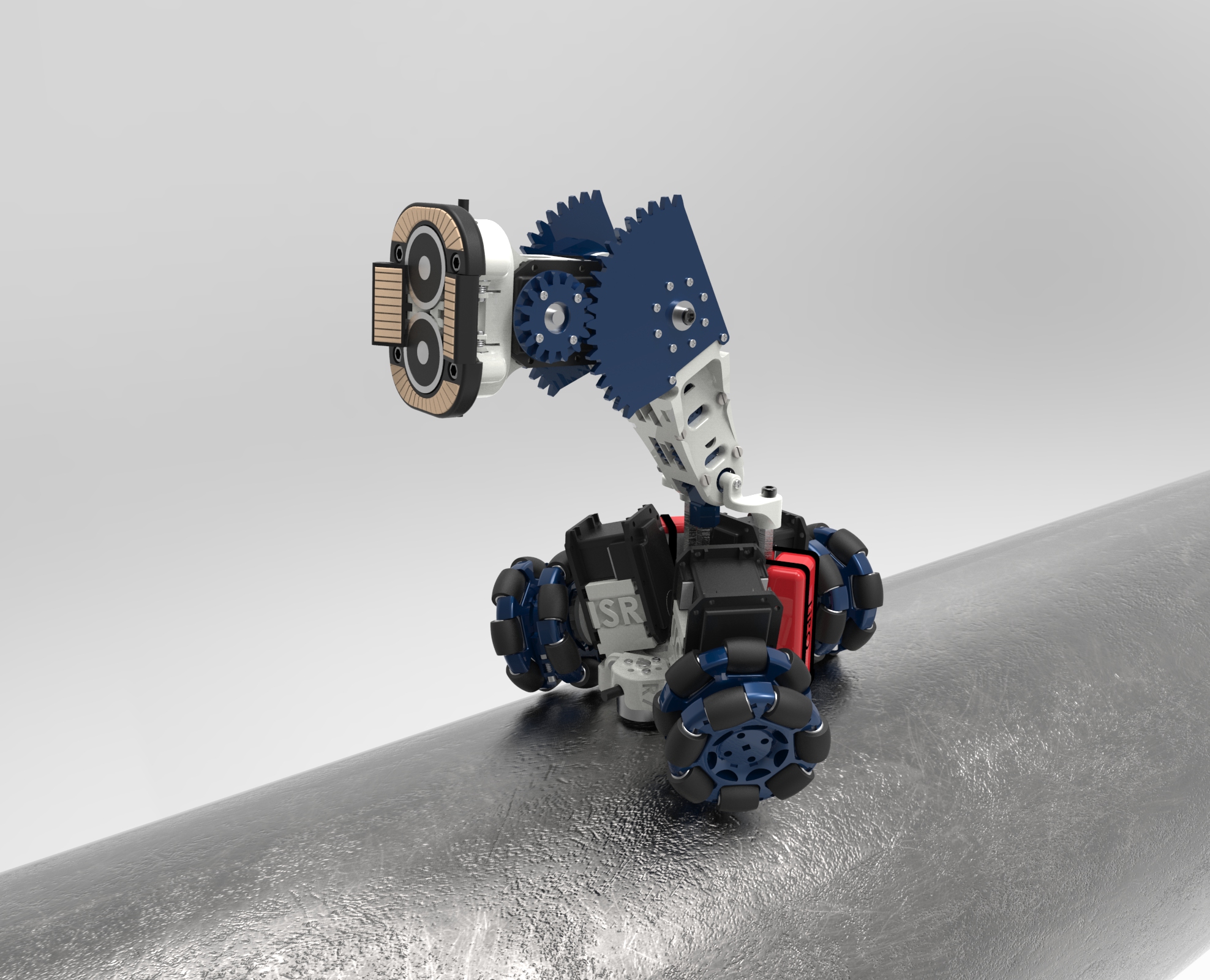
Description: This project aims to develop several prototypes of climbing robots to be applied for inspection of pipelines in oil, gas and petrochemical industries, as well as shipyard applications e.g. ship hull grooming. The previously developed 3DCLIMBER, was a successful implementation of the first climbing robot in the word which could climb from structures with bents, branches and deal with step changes on the profile structure. Yet there were many problems which remained unsolved during the implementation of the 3DCLIMBER. The current projects aims as further development of the 3DCLIMBER, but also to design and develop several novel concepts. In detail, the project involves conceptual and detailed design, development of mechanical prototypes, control boards, sensorial system, and test of at least three climbing robot prototypes.
PI: Mahmoud Tavakoli
Reference: PTDC/EME-CRO/121547/2010
Fundind entity: FCT
Budget: 73589 €
Duration of the action: 2012-01-13 - 2015-12-13